If you have been paying attention to recent arculus and Jungheinrich updates, you will have seen that together, we are building a new, state-of-the-art logistics centre for the Dutch company, Prodrive Technologies. What makes this new facility so special is the combination of AGVs and AMRs working together to create a holistic logistics solution. But what exactly are the differences between these two popular products? What do the acronyms actually stand for and how do they work together?
Automated Guided Vehicles, or AGVs, are well-known pieces of advanced equipment used for repetitive material transportation inside large warehouses, and until recently they were the only option for automating intralogistics tasks consistently. Now, with the evolution of industry 4.0, and the higher standards for efficiency, AGVs have a new, more sophisticated counterpart: Autonomous Mobile Robots (AMRs). While both technologies can theoretically perform the same tasks, there are many intrinsic differences between them.
Cars, trains, and GPS routes
The AGV era began in the 1950s, through the need to automate the transport of goods1. The technology was quite simple, with vehicles using what is called inductive track guidance, i.e.: an electrically conductive strip that was mounted on the floor. Today, the principle hasn’t changed much, and modern AGVs still rely on similar basic navigation technologies.
While the original method has proven itself inexpensive and reliable over the years, limitations were also observed as logistics processes became more complex. The absence of over-the-air updates, for example, means that any small software fixes or improvements need to be manually programmed into the machines. Another key downside to these classic vehicles is that any route changes demand a fair amount of effort and resources since orientation strips need to be manually moved – just like train tracks.
The operation of AMRs, on the other hand, can be compared to that of a car with GPS. Users can easily define departure and destination points, and the fleet software is then able to chart the best route between them. The AMR then uses the route information to drive between the two points, and will create a situation based trajectory. Additionally, the AMR is able to use data from its past journeys to improve usability, allowing for ever-increasing adaptability and performance for new applications in goods transportation.
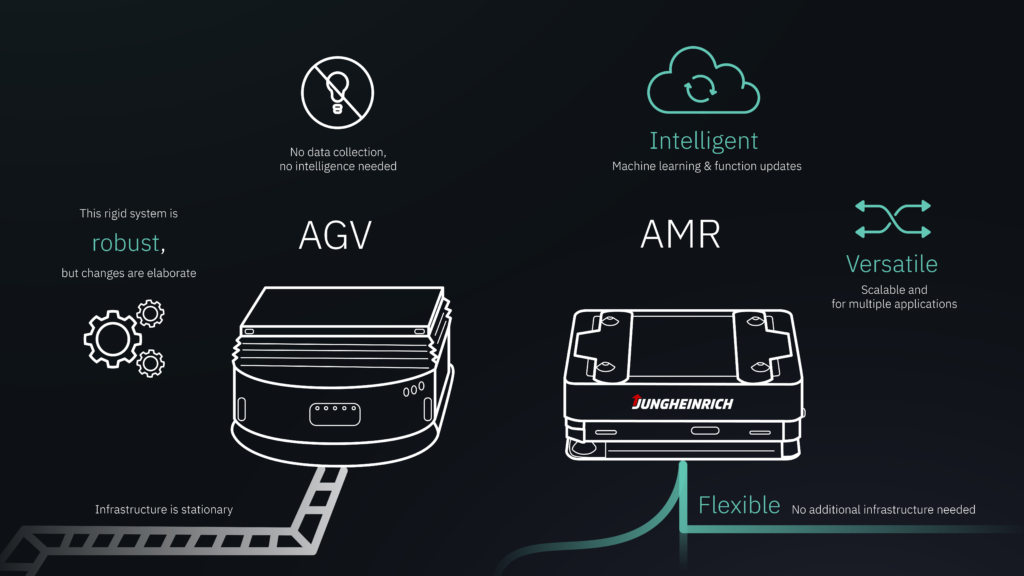
The way the fleet management software can chart intelligent routes (e.g., based on the current traffic situation) comes from AMRs not relying on manually programmed routes, but on global maps, in which real-time localisation enables the robots to adapt to any new route information. Thus, since deployed AMRs of one fleet can rely on the same map – which needs to be created only once – it’s a lot easier to deploy bigger fleets or make changes to the number of operating robots. This localisation and navigation system offers a clear advantage over the inflexibility of the orientation strips used by AGVs.

Better Together
Although AMRs are a technological evolution of traditional AGVs, they do not fully replace them. In fact, optimal intralogistics solutions often include a combination of multiple technologies, leveraging both the advantages of established guided vehicles and the flexible navigation capabilities of mobile robots. In this combination model, AGVs such as the Jungheinrich EKX 516ka, can for example be used to perform vertical lifting manoeuvres, while AMRs can be deployed for the transport of loads across the logistics facility. In this way, AMRs act as a connecting element to order picking AGVs, which are in their turn responsible for placing or removing the loads from the robots’ top surface.
With this combination, warehouse managers can count on an increased flow of goods through the deployment of multiple AMRs simultaneously; and with minimal software programming. The result is an optimised intralogistics process, which ultimately leads to a better return on investment (ROI).